清华大学机械系成功研发全新管道探测机器人 其成果已正式发表
据清华大学官网消息,清华大学机械系现代机构学与机器人化装备实验室研发了一种可在亚厘米级管道中高效运动的管道探测机器人。
目前已开发的各种管道巡检机器人包括轮式、腿足式、履带式等运动机构,多采用电磁电机驱动,适用于大口径管道的检测。
当涉及到直径小于一厘米的微细管道时,机器人的尺寸很难按比例缩小。
本项工作提出了一种智能材料驱动的微型管道检测机器人(重量 2.2 克,长度 47 毫米)。
该成果以“用于亚厘米级管状环境导航的管道检测机器人”(A pipeline inspection robot for navigating tubular environments in the sub-centimeter scale)为题发表在《科学 机器人》(Science Robotics)上。



- 【图文】迅雷会员钻石子账号怎么设置?
- 路由器有什么作用 路由器的作用分析
- 华为荣耀9X手机值得买吗 荣耀9X手机全方位评测
- 投屏软件哪个好?当下最热门的十款投屏软件下载推荐
- 苹果系统ios7怎么打开控制中心 ios7控制中心设置教程图文详细介绍
- 网络不稳定怎么办
- 声卡驱动装不上怎么办 声卡驱动装不上解决方法
- iOS7.0.4的安装教程 升级iOS7.0.4的三种方法
- iphone ios6.1.3/6.1.4/6.1.5完美越狱教程(附ios6.1.x越狱工具下载)
- 教你如何选购性价比较高的笔记本电脑 推荐几款笔记本
- 诺基亚x1手机怎么样?配置如何?
- 路由器什么牌子的好一点? 家用路由器牌子推荐
- 360路由器登陆页面打不开怎么办?luyou.360.cn登陆(设置)页面打不开解决办法
- 光纤猫光信号闪红灯不能上网怎么办?
- 双频路由器2.4G和5G两个WiFi怎么合并成一个
- 真我全球首家线下旗舰店已开启试营业 并发布最新外观形象分享
- 手机怎么查高考分数?5184高考成绩查询方法
- 路由器端口映射怎么添加和删除?
- iOS7.1 beta3怎么升级 两种升级iOS7.1 beta3系统方法详细教程
- ios9.1正式版固件下载 ios9.1正式版固件官方下载地址
- 诺基亚800软件下载方法及使用教程
- 海信家电怎么样 海信家电详细介绍
- 电脑老掉线是什么原因 电脑老掉线该怎么解决
- 苹果手机充电多长时间最好及相关介绍
- 北京端午节可以出京吗最新消息 端午节北京可以回老家吗?2022
- 斐讯K3路由器内部做工如何?斐讯K3路由器拆解图评测
- 使用建设银行手机银行存取定期存款的方法
- 小米路由器3怎么测速? 小米路由器测速的技巧
- 光纤怎么连接无线路由器?光纤连接无线路由器方法
- 金鱼的记忆真的只有7秒吗 蚂蚁庄园9月13日答案
- 创维电视55寸价格大全 液晶电视多少钱
- 携程旅行app怎么使用预定酒店的返现金额?
- 路由器怎么调整时间日期? 路由器时间日期的设置方法
- 新外星人17值得买吗?戴尔新外星人17寸笔记本全面评测图解
- oppo reno3发布会直播地址 oppo reno3 pro 5G新机发布会直播网址
- 网络管理常用命令之一 Ping 命令详解(图文)
- 图书馆什么梗什么意思 巴黎图书馆、上海图书馆梗的出处来自哪里
- cmos和ccd的区别是什么
- 最新更新winterboard怎么用?iOS 7越狱美化插件winterboard下载安装使用教程
- iOS14Beta5更新了什么 iOS14Beta5更新内容汇总
- itouch4越狱后如何通过Cydia添加软件源
- 魔方格学习软件怎么换教材?
- hp5200n多少钱 hp5200n报价及性能评测
- 人人影视正式关站 公告称正清理内容
- 无线网密码忘了怎么更改?更改无线网密码图文教程
- 小米11Pro和小米10Pro区别是什么 小米11Pro和小米10Pro对比介绍
- 如何定位别人手机位置 手机定位步骤
- 努比亚小牛手机怎么样?好不好?
- 讯飞输入法电脑版设置方法教程以及讯飞输入法设置常见问题
- 报道称宝马将在墨西哥圣路易斯波托西造车 其量产时间也已确定
- iphone7和iphone7s哪个好 iphone7s和iphone7区别对比评测
- 无线路由器限速设置、无线路由器怎么限速、无线路由器限速软件的选择
- 长征五号B遥三运载火箭已安全运抵发射场 总装等工作将有序展开
- 索尼互娱首席执行官:公司将为PlayStation收购更多游戏工作室
- YOGA14s酷睿版以更轻盈体裁登场 仅重1.41kg更适合移动办公
- 戴尔灵越14Plus创作本高能来袭 处理器可任选i5/i7 散热更强
- 河北疫情最新消息今天情况怎么样 河北新增19例本土无症状感染者
- 灵耀Pro14携豪华配置亮相 OLED屏可以黄金比例呈现高清画面
- 谷歌最新推出Android13Beta2.1更新 多个曾反馈问题已获解决
- 雪铁龙版“宏光MINI EV”售价公布 搭载一台最大功率6千瓦的电机
- 新款RAV4荣放正式上市 四驱版将提供全新样式的越野外观套件
- 疑似新一代红旗H5售价曝光 前脸为家族式高山流水式进气格栅
- 卢浮宫蒙娜丽莎被破坏遭蛋糕袭击 蒙娜丽莎是谁画的为什么出名
- CDProjektRed高管透露新进度 称巫师4游戏已步入前期制作阶段
- 宝马CE04电摩国内首发 支持手机互联以及导航等功能
- 蔚来ET5正式亮相 前轴搭载150kW的永磁同步电机
- 郭明錤爆料苹果将依旧维持新机发货计划 落后进度也在可控范围内
- 南大碎尸案进展怎么样凶手是谁 南京碎尸刁爱青的案子破了吗2022
- 凯迪拉克LYRIQ锐歌将大定 首次搭载一块33英寸曲面OLED屏幕
- 一汽首款双电机混动专用变速器正式量产 可集成减速增速等功能
- 中国空间站超高清示意图正式公开 可观察整体T字构型细节满满
- 新一代东风标致408内饰预告 将换装全新样式的电子档杆
- 百度创始人发布内部信:环境越艰苦越能考验一个企业的真功夫
- 杜卡迪推出折叠电动自行车 主车架形似闪电的造型
- 小米米家净水器1200G发布 配备OLED智能屏显龙头
- 小米米家声波电动牙刷T200发布 采用0.15mm杜邦软毛抗菌丝
- 古驰推出6300元“玉镶金”智能指环 配有18K金制作的双螺旋装饰线
- 小米发布600ml大容量水杯 水杯配有软硅胶材质提环
- 全新ROG SWIFT电竞显示器来了 支持开启G-SYNC电竞模式
- 华硕14寸轻薄本a豆14 Pro上架 搭载英特尔12代酷睿i5标压处理器
- 小米12 Pro 618首降500 主摄是全球首发的索尼IMX 707
- iQOO Neo6 SE开箱图赏 支持80W旗舰级闪充规格
- realme GT Neo3T官宣 前置摄像头位于左上角位置
- Redmi 11首度曝光 搭载联发科天玑700处理器
- 红魔7S Pro新机正式曝光 有望成为骁龙8+跑分王者
- vivo T2x悄然上架 搭载联发科天玑1300处理器
- 88vip消费券618是全场通用吗 88vip会员618消费券可以叠加满减吗
- 三星海外发布GalaxyM13手机 将具备多款配色 侧置指纹识别
- 东风EV新能源新车谍照来袭 车型代码为DNA01命名尚待公布
- 广安邻水什么时候解封最新消息 现在可以去广安邻水了吗2022
- 原神即将进行版本更新停服维护 并公告将暂停支持雷蛇幻彩功能
- 小鹏新车路试谍照曝光 新款纯电SUV预计将采用轿跑设计造型
- AMD重新宣布AM5插槽PPT功耗数据:实际上可达到230W
- ZBookFirefly14G9移动工作站获曝光 显卡处理器配置皆升级
- 北京地铁什么时候解封2022 北京地铁恢复正常运营了吗最新消息
- XPG将再次联手ROG发布联名款DDR5内存 可达到1:1散热比重
- 铭瑄预告将发布W680版ATX工作站主板 并将全面支持12代酷睿
- iFLYBUDSPro真无线耳机:可进行外语翻译且专为职场人士而设计
- 剪映专业版已支持英伟达视频编解码 视频制作速度可提高四倍多
- 拼多多公布2022第一季度财报 本季度平均月活跃用户突破7亿大关
新闻排行









精彩推荐
- 比亚迪海豹全黑版实拍照来了 全新配色更显凌厉整体感更强
- 索尼官宣将改编GT赛车系列游戏为电影 原作最早发售于97年
- 苹果14Pro新机现身ApplePay广告视频 再次证实新机屏幕规格
- 飞利浦27E1N5900E显示器:可支持4ms灰阶响应画面效果佳
- 大众AeroB最新效果图曝光 其外观将按ID.家族最新设计理念打造
- 联想小新Air14 2022酷睿版等电脑公开售价 首发价4499元起
- 奔驰1955年双门跑车以超九亿元天价成交 拍卖所得将被捐赠
- 小米净水器H800G Pro发布 主打RO滤芯等四大特色可价保618
- 华硕AP201冰立方机箱正式开售 应用免工具拆卸设计并预置接口
- 小米第二代米家智能小饭煲亮相 部分操作按钮等设计已获改变
超前放送
- 清华大学机械系成功研发全新管道...
- 端午节去长沙要测核酸吗 2022湖...
- 神舟十四号载人飞行任务标识正式...
- 索尼宣布自三年后起将不再为PS4...
- RTX40系显卡首批产品爆料整理:C...
- 首款4K 240Hz刷新率显示器三星G...
- 一图看懂全球首款4K全色激光投影...
- 森海塞尔官宣杨洋成为MOMENTUM系...
- 荣耀70 Pro+手机发布 首发支持...
- 上海餐厅什么时候恢复营业 上海...
- 微星QD-OLED版曲面电竞显示器发...
- 荣耀70 Pro+开箱图赏 新机搭载...
- 谷歌宣布将在明年发布全新车载街...
- 上海快递现在能寄进来吗最新消息...
- Redmi K40S喜迎新配色 支持MEM...
- realme GT2大师探索版曝光 该...
- 谷歌Pixel 7工程机上架 新机搭...
- Redmi Note 11T Pro今晚首销...
- 比亚迪海豹全黑版实拍照来了 全...
- 儿子陪妈妈拍婚纱照被误认成情侣...
- 杜伽全新机械键盘上市 可实现多...
- 微星MEG Ai1300P/1000P电源即将...
- WS WRX80工作站主板:可高效率...
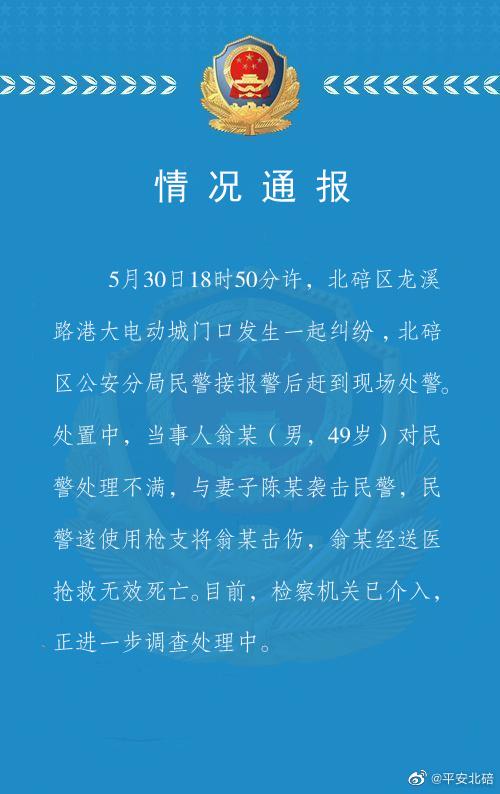
- 5月30日昨天北碚警察枪击事件怎...
- 全球过半自行车均由我国生产 中...
- MAG B660M DDR4新品迫击炮主板...
- 端午节到北京的人需要隔离吗2022...
- HDPlex发布ATX新品电源 最高输...
- realmeBook增强版Air笔电618直降...
- 神舟正式推出战神Z7游戏本 全尺...
- 主演透露《黑袍纠察队》第三季相...
- 最新ThinkPadE15商务本发布 新...
- 大飞老师什么梗什么意思 faker...
- 蒙娜丽莎画像被人扔蛋糕 肇事者...
- 新MacBook Air曝光 会获得多年...
- 曝三星Galaxy S23处理器调整 ...
- 92号汽油进入9元时代 国内汽...
- 淘宝618喵运会拉拉队玩法怎么组...
- 全球首款OLED Windows掌机正式...
- 游戏愤怒的小鸟将以DLC形式登陆M...
- realmeGTNeo3T正式官宣 并公开...
- Plex将发布可原生适配M1 Mac的B...
- 曝真我还有骁龙870新品尚待发布...
- 小米商城推出FRIEND会员内测 一...
- GalaxyM23 5G版登陆巴西市场 ...
- 爆料称OPPO新款旗舰手机将至 屏...
- 儿童读物描述女性器官含有性暗示...
- Chromebook更新USB-C数据线连接...
- 亚马逊已通知部分Kindle用户提醒...
- GoogleDrive已加入键盘快捷键 ...

