NASA研发厘米级3D打印游泳微型机器人 并以此组成SWIM系统
美国宇航局正在开发和完善许多海洋进入任务概念,包括欧罗巴科学探索地下进入机制类热机械钻井机器人,以及更小的微型游泳机器人。
SWIM系统由厘米级3D打印游泳微型机器人组成,长度约12厘米,配备MEMS传感器,由微型执行器驱动,并通过超声波进行无线控制。
携带SWIM机器人的着陆器降落在卫星冰壳上后,会释放一个穿冰机器人,利用其核电池的热量融化一条穿过冰层通往下方海洋的隧道。
一旦到达那里,穿冰机器人将释放大约50个SWIM机器人,开始探索寒冷水域。
每个SWIM机器人都有自己的推进系统、机载计算系统和超声波通信系统,还配有简单的温度、盐度、酸度和压力传感器。





- 【环球播资讯】华为nova3i怎么样 华为Nova3i配置参数、价格及真机图赏
- 热门:三星Note5手机怎么格式化SD卡?
- Steam销量周榜获公开 第二至三名由不同版怪物猎人续作获得
- 焦点!TP-Link TL-H29RA路由器怎么设置?TP-Link TL-H29RA路由器设置图文教程
- 环球热点!WLAN是什么意思?WLAN基础知识介绍
- 数码博主爆料OPPO折叠屏新机:代号蜻蜓机型将搭载120Hz小屏
- 全球新消息丨360WiFi6全屋路由器怎么样 360WiFi6全屋路由天穹系列评测
- 每日播报!思科模拟器上两台路由器怎么互相连接S0/0/0接口?
- 微资讯!朵唯倾城l1什么时候上市?朵唯倾城l1上市时间及配置参数详解
- 每日精选:ZTE中兴路由器设置图文教程
- 环球精选!小米手机怎么给程序单独加密?
- 真我GT2大师探索版将亮相下周realme发布会 全新潮流设计来袭
- 环球观热点:三星A90手机配置怎么样 三星A90手机参数配置及价格介绍
- 世界热文:怎么才能快速清除iPhone手机的所有数据 iPhone抹掉所有数据方法
- 全球快资讯丨联想ZUK Z2 Pro有几个版本?ZUK Z2Pro版本介绍
- 【世界速看料】150M迷你型无线路由器怎么设置?
- 【当前独家】iPhone11突然没声音了怎么办?iPhone11没声音的多种解决方法
- 资讯:iPhone固件区分方法教程
- 全球微头条丨Realmex7Pro优缺点都有哪些?
- 每日快讯!iPhoneX怎么恢复出厂设置?苹果iPhoneX手机还原出厂设置图文教程
- Xiaomi Book Pro 14 2022图赏 屏幕最高可达600nits峰值亮度
- 速递!iPhone XR怎么长截图?iPhone XR滚动截屏两种方法
- 热点!红米k30发布会直播网址 红米k30手机发布会直播地址
- 动态:华为nova6如何唤醒语音助手?
- 天天时讯:OPPOK9对比OPPOK7X哪个好?
- 滚动:抖音跑马灯动态壁纸怎么设置?苹果x设置抖音跑马灯壁纸的方法介绍
- Xiaomi Book Pro 16 2022笔记本发布 支持100% DCI-P3广色域
- FanlessTech放出NUC12Pro迷你主机实拍照 新品有望即日发售
- 世界动态:iPhone6充电没有反应充不了电怎么办
- 全球时讯:小辣椒A1值得买吗?小辣椒A1手机全面深度评测图解
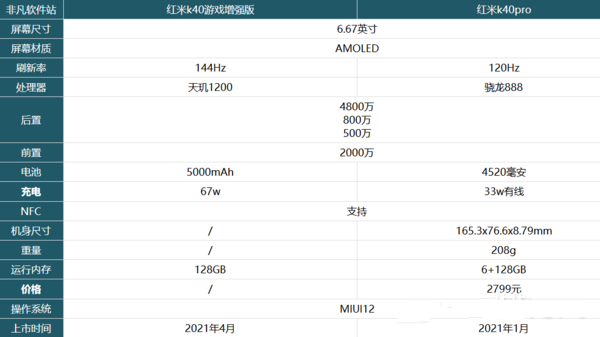
- 天天速读:红米k40游戏增强版对比k40pro哪个更好?
- 世界看热讯:华为p10和荣耀8哪个好?华为荣耀8和P10详细区别对比评测图解
- 全球新资讯:红米k40pro和k40pro+区别是什么 红米k40pro和k40pro+对比介绍
- 环球微头条丨iphone手机照相机的HDR怎么用
- 比亚迪于六月售出十三万辆汽车 乘用车销量已同比增长168.8%
- 每日消息!VLAN是什么 什么是VLAN
- 天天最新:魅族mx5pro什么时候发布 魅族mx5pro发布时间(视频)
- 环球热头条丨iphone4s/iphone4升级到ios7正式版后怎么降级?
- 精选!华为P20值得买吗?华为P20 Pro配置性能外观详细评测
- 天天观热点:DNS劫持如何避免和解决?
- 小米官方公布12SPro跑分数据 安兔兔已排至骁龙8Gen1机型第一
- 热点聚焦:华为G7 Plus和华为荣耀7哪个好?华为G7 Plus和华为荣耀7区别对比评测
- 世界实时:小米路由器3怎么设置 小米路由器3设置图文教程
- 天天短讯!iPhone怎么截长屏?苹果手机滚动截屏网页页面方法
- 环球热资讯!ios8越狱后必装插件有哪些?ios8越狱后必装插件汇总详情介绍
- 【全球新要闻】路由器怎么设置限速(避免出现网速慢)路由器限速设置图解
- 全球视讯!华为荣耀5x与荣耀6哪个好?华为荣耀5x与荣耀6详细对比评测
- 环球快资讯丨乐视超级手机1s做工怎么样 乐视1s拆机图解评测
- 【环球快播报】TCL idol X东东枪2做工怎么样 TCL idol X+拆机图评测全面图解
- 【报资讯】荣耀分布式路由如何设置?荣耀分布式路由设置教程
- 罗技AuroraG700系列外观图曝光 全系均主打白色并载有RGB
- 利亚德黑钻系列MicroLED新品官宣亮相 对比度大增三倍亮度提升
- Win11开发者虚拟机镜像上线 将涵盖一系列开发工具且无需激活
- 小米分布式Wi-Fi 6路由HomeWiFi图赏 支持最高10台设备组网
- 绿联正式发布USB4数据线产品:传输速率将可达到40Gbps
- 酷冷至尊发布显卡支架V3 支架全面升级了高品质钢材
- 陈劲放出新款Razr折叠机展架设计图 新品将仍为上下翻折模式
- 米家自动免洗洗手机套装发布 洗净后无需用水冲洗即可恢复洁净干爽
- 2022款ProArt创16将在下周一开启预售 新版本或将升级处理器
- 小米手环7Pro开箱图赏 屏幕显示区域比小米手环7大50%
- 零跑汽车官宣上月共交付上万台新车 上半年累计同增高达265%
- NASA:正积极为Aretmis1准备发射窗口 升空时间将定在八九月
- SpaceX获得车辆安装StarlinkWiFi服务授权 卫星互联网领域扩大
- 创见发布ESD380C便携式SSD 产品包装还将附有多种转接电缆
- Microchip新推显示屏旋钮控制器 可直接安装于屏幕不需打孔浪费
- 中科创达与亚马逊云科技深化合作 助力提速企业智能物联网部署
- 北斗天汇董事长刘忠华:北斗三号全球系统丝毫不逊色于GPS
- 消息称奥之心将在两个月后推出OM-5相机 上市时间则定在十月
- NuraTruePro真无线耳机正式发布 将可支持aptX无损音频播放
- 卢伟冰八字概括小米12S Ultra 该机搭载高通骁龙8+旗舰处理器
- realme GT2大师探索版开启预定 采用6.7英寸中置挖孔柔性直屏
- 小米12S 8+256G版抢购一空 新机配备徕卡专业光学镜头
- 小米12S Ultra开箱图赏 小米12S Ultra配备6.73英寸AMOLED屏幕
- iQOO 10系列正式官宣 iQOO 10 Pro机身背部配备矩阵式三摄方案
- 真我GT2大师探索版外观曝光 该机采用硬箱造型的直角金属中框
- 魅族18s系列最高直降800元 魅族18s全系搭载骁龙888+处理器
- 2023款YOUNG光小新微型车启动预售 系列售价由6.48万元起步
- 今起国内航线燃油附加费上调 航空公司需要多措并举增收节支
- EVGA正式发售美版RTX3090TiKingpin显卡 定价已超过一万
- 曾是安卓一哥 HTC发布平板A101 这款设备采用10.1英寸显示屏
- 小米12SPro可实现120W澎湃秒充功能 还可选恒温模式确保低温
- Spotify安卓版应用软件无法启动 用户反馈后官方已开启调查
- AOKZOE A1掌机正式亮相海外市场:新品可运行Win11系统
- 魅族科技张贴预热海报宣称将公布新消息 口号也已写明将新出发
- 威刚发布31C系列工业级SSD新品 最大容量可达2TB不惧高负载
- ThinkBookPlus详细配置由官方正式公开 将配置两块触控屏幕
- Cherry新发布静音机械轴体 触发压力65cN总键程为1.8毫米
- 新款ThinkPadNano口红电源上架 满电更快有三项外观颜色可选
- MLPerf基准测试结果显示:九成参赛者均为英伟达与其合作伙伴
- 91mobiles:传音印度版InfinixY1智能电视售价或在千元以下
- 摩根大通分析师Chatterjee:预计苹果最新收益报告将好过预期
- 报道称三星廉价版折叠屏新品定价约低于5170元 售价更实惠
- 零售商曝光InfinixNote12 5G手机 显示其将具备AMOLED屏
- 杜卡迪研发总监:将在FIMMotoE赛事中提供支持 并积累技术经验
- 小米笔记本Pro2022正式亮相 将采用12代酷睿处理器让灵感增速
- 据传AMD将发布更多款3D V-Cache处理器 以及低端版锐龙CPU
- 最新款iQOO U5e完成3C质量认证 旧版本已在上月正式开售
- 全球首款RISC-V笔电新品ROMA正在预购中 预计九月可正式发货
- 两款三星新机获得3C认证 将标配EP-TA800充电器可实现快充
- 罗永浩“退网”账号发布首条内容 称自己没有调侃新东方
新闻排行









精彩推荐
- 酷冷至尊显卡转接支架套件V3:可无缝兼容安装多款机箱用处广
- Cherry新发布静音机械轴体 触发压力65cN总键程为1.8毫米
- XboxSeriesX主机再公布联名新机 外观造型打磨细致质感绝佳
- 黑鲨冰封制冷背夹3Pro首日销量再创佳绩 一经开售便点燃消费热情
- Safari技术预览版148上线 升级后将可与部分macOS13设备兼容
- 京东云无线宝AX3000后羿路由器来了 核心功能众多网络效力高
- 小米有品新推赛默口红小风扇 外表类似口红实际还能用作手电筒
- 世界热门:ZOL科技早餐:微信推出图片识别功能,苹果自研5G芯片失败
- 环球热点!星链要完?要求客户支持对抗Dish
- 曝苹果14系列组件供应商已开始出货 以此推断新品将在九月到来
超前放送
- NASA研发厘米级3D打印游泳微型机...
- 又一时速350公里高铁马上开通 ...
- 英特尔Gaudi2相关DL基准测试结果...
- 小米新推出首款WiFi6分布式路由...
- 跃我T-Rex2智能手表登上34553米...
- 优派采用LGD 165Hz IPS游戏显...
- TP-LINK纸片路由顶配版开售 路...
- 红魔将推出27寸Mini LED显示器...
- ROG推出降临TWS Pro耳机 支持...
- 真我Buds Air3 Neo畅听可达30...
- ROG游戏手机6正式上架 该机是业...
- 真我GT2大师探索版盲订开启 该...
- 腾讯ROG游戏手机6正式登场 新机...
- 腾讯ROG游戏手机6发布 正面采用...
- 腾讯ROG游戏手机6 Pro发布 搭...
- 腾讯ROG游戏手机6预售 配备3300...
- 腾讯ROG游戏手机6图赏 ROG6搭载...
- ROG酷冷风扇6散热背夹发布 风扇...
- 曝iPhone14或9月13日发布 今年P...
- 小米12S/Pro正式首销 小米12S正...
- 驯龙大师iQOO 10系列今天官宣 ...
- 小米12S Pro正式首销 是第一款...
- 红魔7S《原神》30分钟实测 红魔...
- realme GT2大师探索版正面照公...
- 二手iPhone 13系列成香饽饽 苹...
- 真我GT2大师探索版超窄下巴 搭...
- 壹号本公开OneXDocking掌机底座...
- MarkGurman宣称苹果仍在研发最少...
- 暴雪官宣将在本周五正式发行暗黑...
- 贝尔金发售MagSafe新款三合一无...
- 华擎官方公开B660M PG Riptide...
- 摩托罗拉motoX30Pro官宣将采用骁...
- 新大洲本田发布联名版素MS01电动...
- 威联通科技发布NAS新品TS-h1290F...
- 中兴通讯总裁宣布将升级移动影像...
- 九鲨发布新款M.2塔式散热器 可...
- RTX4090/4080/4070更多细节曝光...
- 路特斯高级设计副总裁透露Type13...
- 尼尔机械纪元年度版将推出Switch...
- 最新华硕灵耀14影青釉推荐:实力...
- QQ音乐内测版现虚拟社区新功能 ...
- 以硬核技术生态为基础累计更多实...
- 黄章将担任魅族科技产品战略顾问...
- DSCC发布最新报告称:预计22年高...
- 小鹏汽车以视频展示城市NGP工程...
- 爆料人声称红米将在本月下旬推出...
- 周杰伦方发声明辟谣新专辑预售 ...
- 法华寺回应万元月薪招资料整理员...
- 35岁“龙妈”晒写真照引围观 眉...
- 消息称iPhone14将涨价一百美元 ...

